| Modele maszyn BALA FELIX | FELIX COMPACT | FELIX EVOLUTION | FELIX EVOLUTION ATC | FELIX ADVANCED 2+1 | |
|---|---|---|---|---|---|
| Ilość stron roboczych | szt. | 5 | 5 | 5 | 6 |
| Wymiary robocze elementu (wys*szer*dł) | mm | 45 * 1000 * Bez limitu | 45 * 1300 * Bez limitu | 45 * 1300 * Bez limitu | 45 * 1300 * Bez limitu |
| Min. wymiary robocze elementu (X*Y*Z) | mm | X-180 / Y-80 / Z-5 | X-180 / Y-80 / Z-5 | X-180 / Y-80 / Z-5 | X-180 / Y-80 / Z-5 |
| Max.wymiary robocze elementu (X*Y*Z) | mm | X-Bez limitu / Y-1000 / Z-45 (mm) | X-Bez limitu / Y-1300 / Z-45 | X-Bez limitu / Y-1300 / Z-45 | X-Bez limitu / Y-1300 / Z-45 |
| Elektrowrzeciono standard | Moc | Brak lub 2.2 kW | 4 kW | 4 kW | Górne elektrowrzeciono (2szt): 4 kW x 2 |
| Dolne elektrowrzeciono: 3 Kw | |||||
| Obroty elektrowrzeciona | rpm | 18.000 | 18.000 | 18.000 | 18.000 |
| Uchwyt narzędzia standard | typ | ISO 30 | ISO 30 | ISO 30 | ISO 30 |
| Wymiana narzędzi | std. | Manualna | Manualna | Automatyczna | Automatyczna |
| Ilość narzędzi w magazynku | std. | N/A | N/A | 4 | 4 |
| Przesunięcie narzędzia | std. | Manualne | Manualne | Automatyczne | Automatyczne |
| System centralnego smarowania | std. | Automatyczny | Automatyczny | Automatyczny | Automatyczny |
| Chwytaki sterowane serwonapędem | typ | Podwójny – Niezależny | Podwójny – Niezależny | Podwójny – Niezależny | Podwójny – Niezależny |
| Rolki dociskowe | typ | Standard | Standard | Standard | Standard |
| Jednostka na odpady | std / N/A | Standard | Standard | Standard | N/A |
| Jednostka wiercąca | std | BALA | BALA | BALA | BALA |
| Całkowita ilość wierteł | szt. | 16 | 16 | 16 | 42 |
| Ilość wrzecion pionowych | szt. | 9 | 9 | 9 | Górna jednostka: 12 +12 |
| Dolna jednostka: 10 | |||||
| Ilość wrzecion poziomych | szt. | 6 (3 x 2) | 6 (3 x 2) | 6 (3 x 2) | 8 (4 x 2) |
| Agregat piłkowy | szt. | 1 | 1 | 1 | N/A |
| Rodzaj stołu wejściowego (podawczego) | typ | Rolkowy | Powietrzny | Powietrzny | Powietrzny |
| Rodzaj stołu wyjściowego (odbiorczego) | typ | Rolkowy | Rolkowy | Rolkowy | Automatyczny |
| Prędkość osi – X1 i X2 | m / min | 90 | 90 | 90 | 90 |
| Prędkość osi – Y | m / min | 80 | 80 | 80 | 80 |
| Prędkość osi – Z | m / min | 30 | 30 | 30 | 30 |
| Oprogramowanie CAD/CAM | typ | BALA | BALA | BALA | BALA |
| Waga całkowita | kg | 1500 | 2000 | 2200 | 3200 |
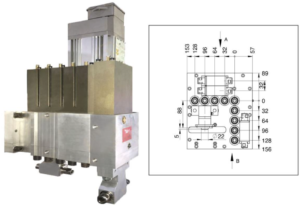
GREGAT WIERTARSKI
|
| ||||||||
PRECYZYJNE POZYCJONOWANIE DZIĘKI SYSTEMOWI PODWÓJNEGO CHWYTKA
|
| ||||||||
SERWONAPĘDY DELTA
|
| ||||||||
STÓŁ ROLKOWY ZAŁADUNKOWY  |
| ||||||||
STÓŁ ROLKOWY ROZŁADUNKOWY  |
| ||||||||
ROLKI DOCISKOWE  |
| ||||||||
WYLOT NA ODPADY  |
| ||||||||
OPROGRAMOWANIE BALA 3D CAD/CAM  |
|
STÓŁ POWIETRZNY ZAŁADOWCZY |
|
STÓŁ POWIETRZNY ODBIORCZY |
|
CZYTNIK KODÓW KRESKOWYCH |
|
BARIERY BEZPIECZEŃSTWA LASEROWE |
|
ELEKTROWRZECIONO HERTZ |
|